Scorbot ER VII Industrial Robot Arm
References:
Documentation:

Current status: It worked! And then some 30-year-old internal connectors disintegrated. We have replacements that need to be soldered on. Limit switches have been replaced, and all limit switch connections and motor wires must be buzzed out down to the source to double check good connection. Anyone is welcome to do this if they feel they are competent at electronic repair, but please keep good organisation of bolts and where things go, and completely put robot back together again before the end of the day. This arm is still in great shape, and we aim to keep it that way!
Controlling the arm:
To control the arm you'll need to connect to the controller box. It only has an RS232 serial interface, but a USB to Serial converter has been wired in, so you just need a USB Mini B? cable and a terminal emulator like putty or picocom. The control is all done via the command line, but the manuals reference an Advanced Terminal System which seems to be an old DOS application which might have a GUI.
As long as the controller is plugged in the USB-to-RS232 converter is getting power and you can connect to it. The controller doesn't need to be switched on. If you connect before switching on you'll be able to see the startup messages to confirm you're connected when you do turn the control on.
Boot up a terminal emulator which can work with an RS232 tty connection. The settings you'll need to connect to it are:
- Baud rate: 9600
- Flow control: none
- Parity: none
- Data bits: 8
On Linux the USB to Serial interface device is probably /dev/ttyUSB0
Once you're connected, you can turn on the red power switch on the controller and you should see messages printing on your terminal like:
—- RAM TEST COMPLETE.
—- ROM TEST COMPLETE.
SYSTEM READY!
>_
You are now logged into the machine! Type help for some commands, but the main robot is controlled using Advanced Control Language. The reference for this is linked at the top of this page.
With the current dodgy connections, homing the robot is a bad idea. Running home or test cause the arm to crash into itself, so make sure you've got your finger near the emergency stop button on the front of the controller.
Logical model:
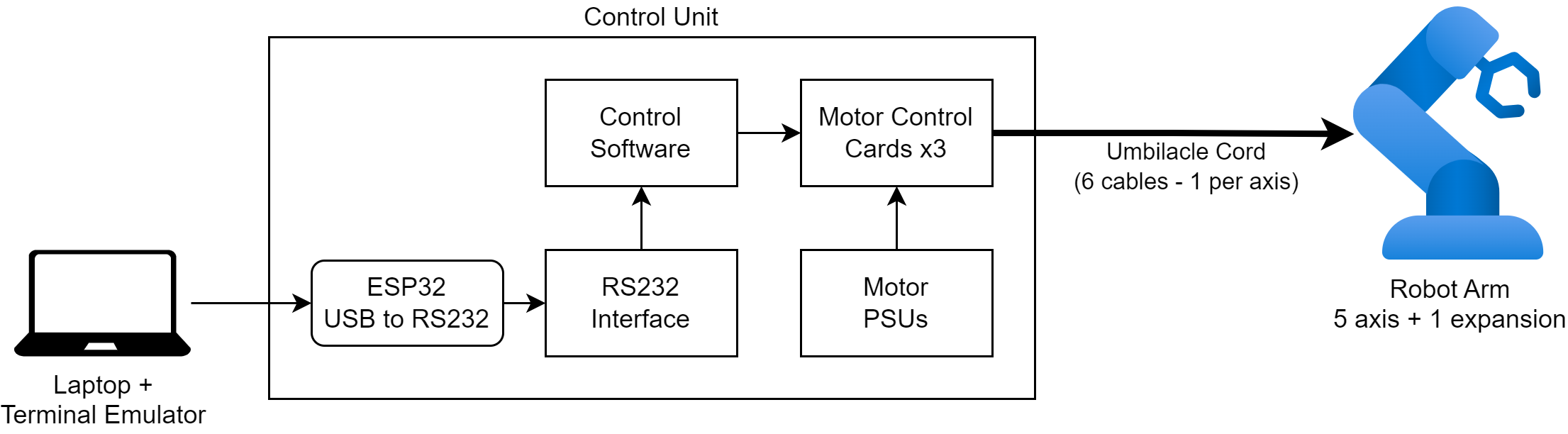
The arm is pretty dumb - it's just motors, encoders and limit switches. All of the power is fed from the control box, and the encoder positioning information is sent back there for processing. Finding and repairing broken wires should be do-able.
I suspect there's broken wires in the arm, or between the arm and the controller. For example, we were seeing no readings from the position encoders on axis 4 + 5, but the motors would still move during homing and test cycles. (As of Apr 2024)